近日,永利23411集团项羽升教授团队在智能建造与无人施工装备领域取得新进展,相关成果以“Geometry-based framework for mapless localization and multi-roller collaboration in pavement compaction”(面向路面压实的无图定位与多压路机协同几何框架)为题,发表在智能建造与建筑自动化领域国际权威期刊 《Automation in Construction》上。永利yl23411为论文第一完成单位,项羽升教授为通讯作者。
道路摊铺与压实是交通基础设施建设中的关键环节,直接影响路面结构质量、施工效率和长期服役性能。传统压路机作业主要依赖人工,多机协同过程中容 易出现漏压、重复压实、轨迹不均匀等问题。随着智能建造和工程机械无人化技 术快速发展,压路机自主作业成为交通基础设施智能施工的重要方向。然而,真实道路施工现场通常存在车道线缺失、边界不规则、环境动态变化、卫星信号受遮挡等问题,传统依赖RTK-GNSS定位和预建地图的自动化方案在复杂工程场景中仍面临部署成本高、适应性不足、可靠性受限等难题。
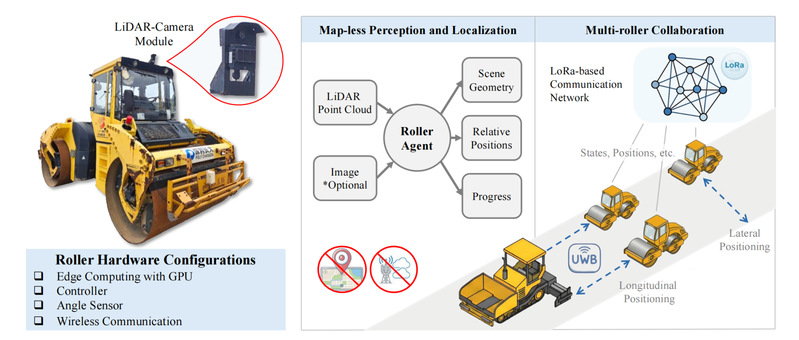
针对上述问题,项羽升教授团队提出了一种面向真实施工场景的无图定位与多压路机协同压实框架。该框架利用激光雷达实时感知道路边界、路缘石、护栏等几何结构,通过鸟瞰图特征提取与参数化边界拟合,获得压路机相对于道路边界的横向位置和航向角;同时结合超宽带测距技术,获得压路机相对于摊铺机的纵向距离。与传统依赖全局坐标和预建地图的方案不同,该方法将施工现场可感知的道路几何信息转化为压实作业坐标,实现了面向任务的自主定位、路径跟踪与多机协同。
在多机协同方面,团队构建了基于相对位置参考的多压路机协同作业策略,使多台压路机能够围绕摊铺机和道路边界形成稳定作业队形,实现施工区域的均匀覆盖。团队还开发了压路机仿真测试平台,可在直线、曲线、变宽路段及复杂边界场景下对算法进行大规模验证。试验表明,该方法在不依赖预建地图的条件下,能够实现与RTK-GNSS相当的定位精度,并在多台双钢轮压路机协同作业中表现出良好的覆盖均匀性和工程稳定性。
该研究为复杂施工环境下无人压路机自主定位和多机协同作业提供了新的技术路径,有助于突破传统自动化压实施工对卫星定位和预建地图的依赖,为道路工程无人化施工装备的工程化应用提供了可行方案。
该成果面向中国保利集团相关工程项目中的真实施工需求开展技术攻关,形成了从理论创新、装备研发、系统集成到工程验证的完整闭环,充分体现了永利yl23411在服务重大工程建设、支撑企业技术升级和推动产学研深度融合的实际成效。同时,该研究联合苏州商力威科技有限公司、中国保利集团相关工程单位、香港科技大学(广州)苏权科、加州大学伯克利分校机械工程系Samuel S. Mao教授、悉尼科技大学等单位共同完成,进一步提升了研究工作的国际化水平和学术影响力。未来,团队将继续围绕智能建造、无人施工装备、多机协同控制和工程质量数字化闭环等方向开展研究,推动更多科研成果在真实工程场景中落地应用。
《Automation in Construction》是Elsevier出版的智能建造与建筑自动化领域国际权威学术期刊,长期聚焦建筑自动化、智能建造、工程机器人、数字化施工、基础设施智能运维等前沿方向,最新影响因子12.6,为JCR 一区期刊、中科院
一区Top期刊。
(张娜)